a. Write down the 5 main parts of a robot and give an explanation on each, including what specific function does the part perform, what does this allow the robot to do?
CONTROLLER :
Every robot is connected to a computer, which keeps the pieces of the arm working together. This computer is known as the controller. The controller functions as the "brain" of the robot. The controller also allows the robot to be networked to other systems, so that it may work together with other machines, processes, or robots.
Robots today have controllers that are run by programs - sets of instructions written in code. Almost all robots of today are entirely pre-programmed by people; they can do only what they are programmed to do at the time, and nothing else. In the future, controllers with artificial intelligence, or AI could allow robots to think on their own, even program themselves. This could make robots more self-reliant and independent.
ARM :
Robot arms come in all shapes and sizes. The arm is the part of the robot that positions the end-affector and sensors to do their pre-programmed business.
Many (but not all) resemble human arms, and have shoulders, elbows, wrists, even fingers. This gives the robot a lot of ways to position itself in its environment. Each joint is said to give the robot 1 degree of freedom.
So, a simple robot arm with 3 degrees of freedom could move in 3 ways: up and down, left and right, forward and backward.
DRIVE :
The drive is the "engine" that drives the links (the sections between the joints into their desired position. Without a drive, a robot would just sit there, which is not often helpful. Most drives are powered by air, water pressure, or electricity.
END- EFFECTOR :
The end-effector is the "hand" connected to the robot's arm. It is often different from a human hand - it could be a tool such as a gripper, a vacuum pump, tweezers, scalpel, blowtorch - just about anything that helps it do its job. Some robots can change end-effectors, and be reprogrammed for a different set of tasks.
SENSOR :
Most robots of today are nearly deaf and blind. Sensors can provide some limited feedback to the robot so it can do its job. Compared to the senses and abilities of even the simplest living things, robots have a very long way to go.
The sensor sends information, in the form of electronic signals back to the controller. Sensors also give the robot controller information about its surroundings and lets it know the exact position of the arm, or the state of the world around it.
b. Write down the 6 degrees of freedom.
1.Horizontal
2.Vertical
3.Depth
4.Pitch
5.Yaw
6.Roll
Monday, July 23, 2007
Sunday, July 22, 2007
4. Types of Robots
Write a report about the use of a four clearly different types of robots in four clearly different situations. Make sure you fully cite and reference all your sources. For each of the four case studies identify which of the five parts of a typical robot is the most important for the specific scenario.
Case Study 1. - This is a robotic car from a science fiction movie (iRobot). Scientist predict that in the next 2 decades there will be new technologies avalible for the progress of A.I cars. There is no particular situation that would make it useful other then the fact that it is used for transport. The positives of an A.I cas could include safer road as it would react to different situations in a reflex time that no human would be able to do in an emergancy. In the case of a robotic car, the most useful of the 5 main parts of a robot would be the "drive". without the drive in an A.I car it would be motionless and would viod the purpose of its need.
This is a robotic car from a science fiction movie (iRobot). Scientist predict that in the next 2 decades there will be new technologies avalible for the progress of A.I cars. There is no particular situation that would make it useful other then the fact that it is used for transport. The positives of an A.I cas could include safer road as it would react to different situations in a reflex time that no human would be able to do in an emergancy. In the case of a robotic car, the most useful of the 5 main parts of a robot would be the "drive". without the drive in an A.I car it would be motionless and would viod the purpose of its need.

The Roomba Vacuum cleaner is an autonomous robot which cleans floors and detects dirtier areas and increases its intensity. The robot moves on 'Beetle-y' wheels, can be controlled by an infra-red remote, has up to 120 minutes of power, automatically goes back to its charging station when running low, and it adjusts to different types of surfaces. When the Roomba bumps into walls or table and chair legs, the roomba will change direction until it finds a path. The most important part of the roomba vacuum woul dbe its sensor. Without its sensor it would constantly be bumping into and walls and other objects on the floor with no sence of direction.
Case Study 1. -
This is a robotic car from a science fiction movie (iRobot). Scientist predict that in the next 2 decades there will be new technologies avalible for the progress of A.I cars. There is no particular situation that would make it useful other then the fact that it is used for transport. The positives of an A.I cas could include safer road as it would react to different situations in a reflex time that no human would be able to do in an emergancy. In the case of a robotic car, the most useful of the 5 main parts of a robot would be the "drive". without the drive in an A.I car it would be motionless and would viod the purpose of its need.Case Study 2 -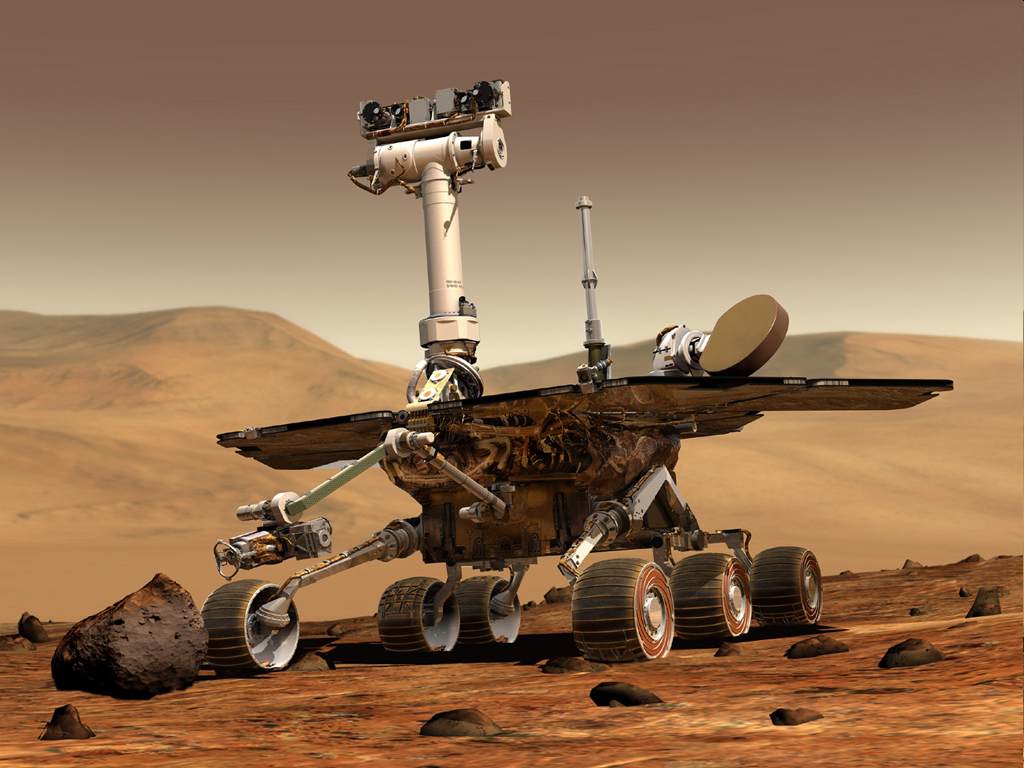 The picture above is that of the mars rover project. It is a programe/A.I robot run by nassa, in the efforts of space exploration. As its name suggest it is a robot designed for the purpose of the exploration of mars. Robots like this are extremely helpful in the progress in science as it is impossible for any human been to get to mars and walk on its surface at this time. The most important part of this robot would be its "sensor". Without its sensor it could not relay digital images back to earth or move around as it could not communitcate with the controller, making the controller just as important in this situation as the sensor.
The picture above is that of the mars rover project. It is a programe/A.I robot run by nassa, in the efforts of space exploration. As its name suggest it is a robot designed for the purpose of the exploration of mars. Robots like this are extremely helpful in the progress in science as it is impossible for any human been to get to mars and walk on its surface at this time. The most important part of this robot would be its "sensor". Without its sensor it could not relay digital images back to earth or move around as it could not communitcate with the controller, making the controller just as important in this situation as the sensor.
Case Study 3 - The T-52 ENRYU, which means 'rescue dragon', is a robot that can lift and move huge pieces of steel, concrete and trees to get to trapped people after an accident like a car crash or natural disaster such as an earthquake. The T-52 moves the rubble much faster than a bulldozer, and much more safely. It can be controlled remotely by a controller with a remote or by a person who in the pod at the front of the robot.After the brain; which for every robot and computer is the main component as it is the only reason they run, and the drive, which they can't move without; the arms would be the most important feature of the T-52 as the robot is useless without them and would not be able to move rubble as was designed as its specific task.
The T-52 ENRYU, which means 'rescue dragon', is a robot that can lift and move huge pieces of steel, concrete and trees to get to trapped people after an accident like a car crash or natural disaster such as an earthquake. The T-52 moves the rubble much faster than a bulldozer, and much more safely. It can be controlled remotely by a controller with a remote or by a person who in the pod at the front of the robot.After the brain; which for every robot and computer is the main component as it is the only reason they run, and the drive, which they can't move without; the arms would be the most important feature of the T-52 as the robot is useless without them and would not be able to move rubble as was designed as its specific task.
Case Study 4 -
The Roomba Vacuum cleaner is an autonomous robot which cleans floors and detects dirtier areas and increases its intensity. The robot moves on 'Beetle-y' wheels, can be controlled by an infra-red remote, has up to 120 minutes of power, automatically goes back to its charging station when running low, and it adjusts to different types of surfaces. When the Roomba bumps into walls or table and chair legs, the roomba will change direction until it finds a path. The most important part of the roomba vacuum woul dbe its sensor. Without its sensor it would constantly be bumping into and walls and other objects on the floor with no sence of direction.
3. Purpose and Use of Robots (cont.)
Entertainment Robots:
 A popular entertainment toy in the last 5yrs has been the release of the robosapians collection. This pareticular robot is called robo-raptor. It can act on its on but can also be remote controoled through a hand heald devise.
A popular entertainment toy in the last 5yrs has been the release of the robosapians collection. This pareticular robot is called robo-raptor. It can act on its on but can also be remote controoled through a hand heald devise.
 Like the robot in the above picture this is another robosapian entertainment toy. This one how ever is the original release of the spian collect and can perform its own task like walking, talking, picking up objects, dancing etc.......
Like the robot in the above picture this is another robosapian entertainment toy. This one how ever is the original release of the spian collect and can perform its own task like walking, talking, picking up objects, dancing etc.......
A popular entertainment toy in the last 5yrs has been the release of the robosapians collection. This pareticular robot is called robo-raptor. It can act on its on but can also be remote controoled through a hand heald devise.Like the robot in the above picture this is another robosapian entertainment toy. This one how ever is the original release of the spian collect and can perform its own task like walking, talking, picking up objects, dancing etc.......3. Purpose and Use of Robots (cont..)
Domestic Robots:
 This is a security robot that is used in business or domestic ares. (unable to get a name)
This is a security robot that is used in business or domestic ares. (unable to get a name)
This particular orbot is a domestic cleaning robot designed to vaccume houses. It is called the Roomba (V1.2) series.
This is a security robot that is used in business or domestic ares. (unable to get a name)This particular orbot is a domestic cleaning robot designed to vaccume houses. It is called the Roomba (V1.2) series.
Thursday, July 19, 2007
3. Purpose and Use of Robots
a. Find with appropriate headings, names, what they doand references;
 The Kuka IR360-125 is a 125kg robot used in used in bolt wielding operations. It is also able to perform certain tasks with alluminium and is a laser guilded machine.
The Kuka IR360-125 is a 125kg robot used in used in bolt wielding operations. It is also able to perform certain tasks with alluminium and is a laser guilded machine.
 Robots lend themselves well to the tedious and repetitive nature of assembly tasks provided that the proper planning and design have been done. In addition, their high level of repeatability has allowed the development of some new technologies in electronic assembly. This particular robot is use for wielding metal togather on the production lines for cars, it is called a ISO 8373.
Robots lend themselves well to the tedious and repetitive nature of assembly tasks provided that the proper planning and design have been done. In addition, their high level of repeatability has allowed the development of some new technologies in electronic assembly. This particular robot is use for wielding metal togather on the production lines for cars, it is called a ISO 8373.
Two images each of industrial, domestic and robots used for entertainment.
Industrial Robots:
The Kuka IR360-125 is a 125kg robot used in used in bolt wielding operations. It is also able to perform certain tasks with alluminium and is a laser guilded machine.Robots lend themselves well to the tedious and repetitive nature of assembly tasks provided that the proper planning and design have been done. In addition, their high level of repeatability has allowed the development of some new technologies in electronic assembly. This particular robot is use for wielding metal togather on the production lines for cars, it is called a ISO 8373.2. Historical Perspectives of Robotics
a. When was the first actual robot invented and used ?
The first actual robot was a paint spraying mechanism and was invented by Willard Pollard and Harold Roselund in 1938 for the company, DeVilbiss.
b. In 1942, science fiction writer Isaac Asimov created a set of three imaginary Laws of Robotics. What was the name of the book Asimov wrote in 1942 in which he described the Laws of Robotics?
The book Isaac Asimov wrote in 1942 in which he presented the Three Laws of Robotics was called Runaround.
The three laws are:
1.A robot may not injure a human being, or, through inaction, allow a human being to come to harm.
2.A robot must obey the orders given it by human beings except where such orders would conflict with the First Law.
3.A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
c. What is the so-called "Zeroth Law of Robotics? Why is it called the Zeroth Law?
The Zeroth Law of Robotics is: "A robot may not injure humanity or, through inaction, allow humanity to come to harm".It is called the Zeroth Law in order to keep the pattern of lower numbered laws being more important than higher numbered laws.
d. Propose one situation where it would be OK for a robot to harm (even kill) a human. Explain why it would be OK in this circumstance.
It would be alrdight for a robot to harm (or even kill) a human been in the instance of a situation were a robot may have to kill a person in order to save lots of lifes. An example of this would be a suicide bombing if a robot could detect a person a bomb in time it would be ok for it to harm or kill the person before he endangers many more lives, therfore the robot may take one life but to save many more innocent lives.
Refrences:
http://fusionanomaly.net/threelawsofrobotics.html
http://www.trueforce.com/Articles/Robot_History.htm
The first actual robot was a paint spraying mechanism and was invented by Willard Pollard and Harold Roselund in 1938 for the company, DeVilbiss.
b. In 1942, science fiction writer Isaac Asimov created a set of three imaginary Laws of Robotics. What was the name of the book Asimov wrote in 1942 in which he described the Laws of Robotics?
The book Isaac Asimov wrote in 1942 in which he presented the Three Laws of Robotics was called Runaround.
The three laws are:
1.A robot may not injure a human being, or, through inaction, allow a human being to come to harm.
2.A robot must obey the orders given it by human beings except where such orders would conflict with the First Law.
3.A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
c. What is the so-called "Zeroth Law of Robotics? Why is it called the Zeroth Law?
The Zeroth Law of Robotics is: "A robot may not injure humanity or, through inaction, allow humanity to come to harm".It is called the Zeroth Law in order to keep the pattern of lower numbered laws being more important than higher numbered laws.
d. Propose one situation where it would be OK for a robot to harm (even kill) a human. Explain why it would be OK in this circumstance.
It would be alrdight for a robot to harm (or even kill) a human been in the instance of a situation were a robot may have to kill a person in order to save lots of lifes. An example of this would be a suicide bombing if a robot could detect a person a bomb in time it would be ok for it to harm or kill the person before he endangers many more lives, therfore the robot may take one life but to save many more innocent lives.
Refrences:
http://fusionanomaly.net/threelawsofrobotics.html
http://www.trueforce.com/Articles/Robot_History.htm
1. Robots and Robotics
Define the following terms:
Robot - A robot is a mechanical or virtual, artificial agent. A robot is usually an electormachanical system by its appearance or movements, conveys a sense that it has intent or agency of its own. The word robot can refer to both physical robots and virtual softwear agents, but the latter are often shortened to bots.
Robotics - is the science and technology of robots, their design, manufacture, and application.
Refrences
http://en.wikipedia.org/wiki/Robot
http://en.wikipedia.org/wiki/Robotics
Robot - A robot is a mechanical or virtual, artificial agent. A robot is usually an electormachanical system by its appearance or movements, conveys a sense that it has intent or agency of its own. The word robot can refer to both physical robots and virtual softwear agents, but the latter are often shortened to bots.
Robotics - is the science and technology of robots, their design, manufacture, and application.
Refrences
http://en.wikipedia.org/wiki/Robot
http://en.wikipedia.org/wiki/Robotics
Im Random ROFL
wtf is a hypotenuse?
wots an abortion?
why are american politicans screwed up?
why do ppl call patrick a tree?
wot is a meatspin mean? and how many can u do?
why do ppl call me a downer?
how does this affect the price of fish?
wot colour is the sky?
does god exsist? and is he asian or philipeano?
wots an abortion?
why are american politicans screwed up?
why do ppl call patrick a tree?
wot is a meatspin mean? and how many can u do?
why do ppl call me a downer?
how does this affect the price of fish?
wot colour is the sky?
does god exsist? and is he asian or philipeano?
Subscribe to:
Posts (Atom)

{kind=link}
{kind=link}